
| 价格区间 | 面议 | 产地类别 | 进口 |
|---|
除了 物体的移动位移(m),移动速度(m / s),加速度(m / s 2),使用两个传感器差分分析俯仰和偏航,还可测量过冲/下冲你可以
此外,您可以轻松显示±%图表等,您可以轻松检查恒速控制是否在目标速度的百分比范围内。
日本小野位移分析软件LV-0930
位移分析软件
LV-0930
- 日本小野位移分析软件LV-0930
日本小野位移分析软件LV-0930

LV-0930是用于各种幅度(包括位移)的数字分析的软件。
通过使用LV-0930位移分析软件,可以分析当待测物体移动或停止时的动态行为,采样频率高达1 MHz。
除了 物体的移动位移(m),移动速度(m / s),加速度(m / s 2),使用两个传感器差分分析俯仰和偏航,还可测量过冲/下冲你可以
此外,您可以轻松显示±%图表等,您可以轻松检查恒速控制是否在目标速度的百分比范围内。
LV-1800
激光多普勒振动计详细信息
LV-2100A
激光干涉位移系统详细信息
特点
-
支持高达5 m / s,1 MHz采样
-
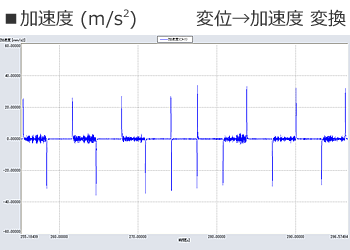
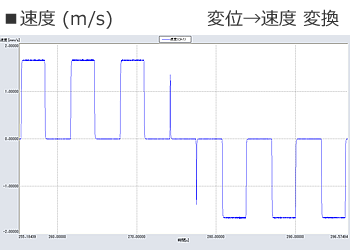
同时转换[位移→速度→加速度]也很容易
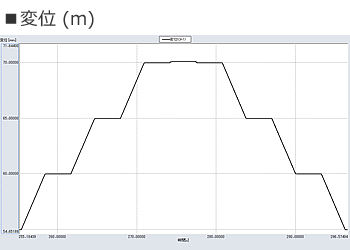
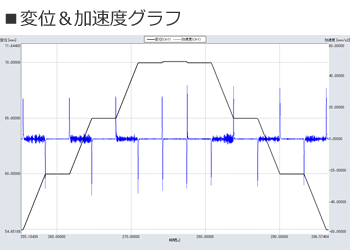
动态特性分析
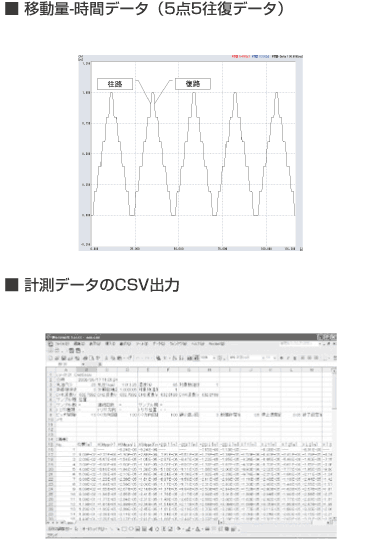
可以看到待测物体的运动特性(位移(m))和此时的速度(m / s)和加速度(m / s 2)的变化,以分析待测物体的动态特性。
可以同时绘制三个波形并以CSV格式输出数据。
频率分析
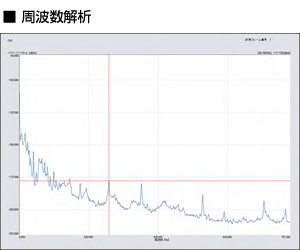
可以对叠加在测量目标的位移上的位移波动的分量进行频率分析。
±%图
与扫描仪,打印头,液体涂布设备,分配器等一样,在评估需要均匀移动精度的设备时,使用±%图表使测量对象在控制速度指令值的百分比范围内您可以轻松检查自己在做什么。
俯仰和偏航,差异测量
通过使用两个或更多个传感器,可以基于测量目标的移动方向来评估垂直旋转(俯仰)和水平旋转(偏转)。
在安装机等中,可以通过差分测量在高速移动期间测量安装器头和喷嘴的摇动和收敛时间。
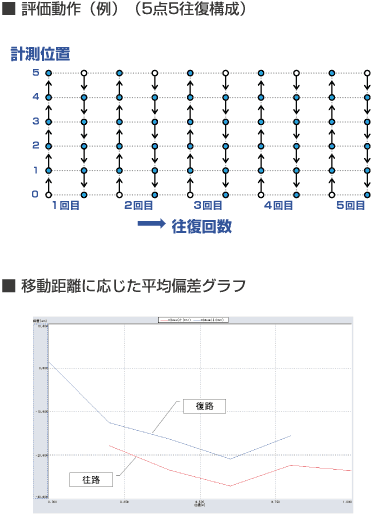
定位精度测试
通过每个周期以相等的间隔在正方向和负方向上操作待测物体,可以自动计算与目标位置的偏差。
在时间 – 位移图上实时绘制设定控制目标值的实际停止位置,并显示位置偏差图。计算每个方向的每个控制目标位置的平均偏差和标准偏差。它可以输出为图形或CSV文件。
规范
| 偏好输入 | 温度(°C)/湿度(%)/大气压(hPa)/激光波长(nm)/热膨胀校正系数(ppm /°C)/目标物体温度(°C)/使用的CH /极性设定数 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 监控功能 | 可监控的频道 | 显示Ch1,Ch2,Ch3和Ch4连接传感器的位移值 | |||||||
| 测量指标 | 白色:测量中断/绿色:测量,监控正在进行中 | ||||||||
| 激光接收ERROR 指示灯 |
白色:接收电平正常/红色:没有光接收,有遮光 | ||||||||
| Y轴刻度(m) | ±10米,±5米,±20毫米,±1毫米,±100微米,±10微米 | ||||||||
| X轴刻度 | 由采样点和采样频率决定 | ||||||||
| 光标功能 | 显示滚动条选择的时间的位移值 | ||||||||
| 位移值SI前缀切换 | mm,μm,nm | ||||||||
| 样品分数显示 | 1到65535(设定值) | ||||||||
| 连续积分数显示 | 1至10(设定值) | ||||||||
| 时间测量 分析功能 |
样本数量 | 样本数1到65535 | |||||||
| 连续次数 | 1到10 | ||||||||
| 采样频率 | 1 MHz,500 kHz,200 kHz,100 kHz,50 kHz,20 kHz,10 kHz,5 kHz,2 kHz,1 kHz,500 Hz,200 Hz,100 Hz,50 Hz,20 Hz,10 Hz,5 Hz ,2 Hz,1 Hz,0.5 Hz | ||||||||
| 录音时间 ※采样点:65535点 |
65.5 m sec(1 MHz采样) 至36小时24分30秒(0.5 Hz采样) |
||||||||
| 触发功能 |
|
||||||||
| 定位精度 分析功能 |
设置 | 间距(mm)/ +方向计数, – 方向计数/重复次数 | |||||||
| 控制余量(mm)/停止速度设定(mm / s)/结束值 | |||||||||
| 采样时间 | 62.5 ms※固定位移测量采样时间62.5 ms固定 | ||||||||
| 定位精度 统计分析功能 |
每个位置位置的平均偏差为重复次数 | ||||||||
| 返回重复次数的每个位置位置的平均偏差 | |||||||||
| 每个位置位置的平均偏差为进行和返回的重复次数 | |||||||||
| 每个位置位置的平均偏差的标准偏差为重复次数 | |||||||||
| 返回重复次数的每个位置位置的平均偏差的标准偏差 | |||||||||
| 每个位置位置的平均偏差的标准偏差,用于来回的迭代次数 | |||||||||
| 每个位置和每个返回时间的偏差 | |||||||||
| 定位精度 统计分析图形 打印功能 |
单向定位偏差和重复性(续) | ||||||||
| 单向定位偏差和重复性(返回) | |||||||||
| 两个方向的偏差和重复性(转/返) | |||||||||
| 测试条件记录和编辑 | 测试日期/时间/测试地点/型号名称/机器编号/测量轴/温度(°C)/大气压力(hPa)/湿度(%)/物体温度(#1)(°C)/物体温度(#2)(°C )/线性膨胀系数(ppm)/定位测量设定值 | ||||||||
| 分析功能 | 振幅 | 时间位移(m) 时间 – 速度(m / s) 时间加速度(m / s2) |
|||||||
| 波动图 |
|
||||||||
| 多渠道分析 | 俯仰和偏航/直线/角度/差异※使用两个或更多传感器时。 | ||||||||
| 移动平均线 | 1到100(次) | ||||||||
| 频率分析 |
|
||||||||
| 偏移校正 | 偏移校正2到10个波形 | ||||||||
| 数字滤波器 |
|
||||||||
| 搜索光标功能 | 主搜索光标,子搜索光标:幅度/时间/时间增量/幅度增量 | ||||||||
| 数据输出 | 数字输出 | 二进制/ csv | |||||||
| 数据输出 | 图像输出 | 位图 | |||||||
| OS / CPU | OS | 微软的Windows ®仅10 64位版本 | |||||||
| CPU | 英特尔®酷睿™2 3 GHz或更高版本 |
||||||||