●该传感器用于检测进入和离开泊位的多层停车场的残余物。
●可以根据每辆车的形状将区域设置为车辆的极限。
●通过简单的区域设置,您还可以检测紧贴车辆的人员。
日本北阳范围传感器UXM-30LN-PW02
区域设置类型/ UXM-30LN-PW02

范围传感器
用于检测多维停车场进出泊位的存在的传感器
- 产品概述
- 应用实例
- 格式列表
- 产品规格
- 轮廓图
- 各种下载
产品概述

●该传感器用于检测进入和离开泊位的多层停车场的残余物。
●可以根据每辆车的形状将区域设置为车辆的极限。
●通过简单的区域设置,您还可以检测紧贴车辆的人员。
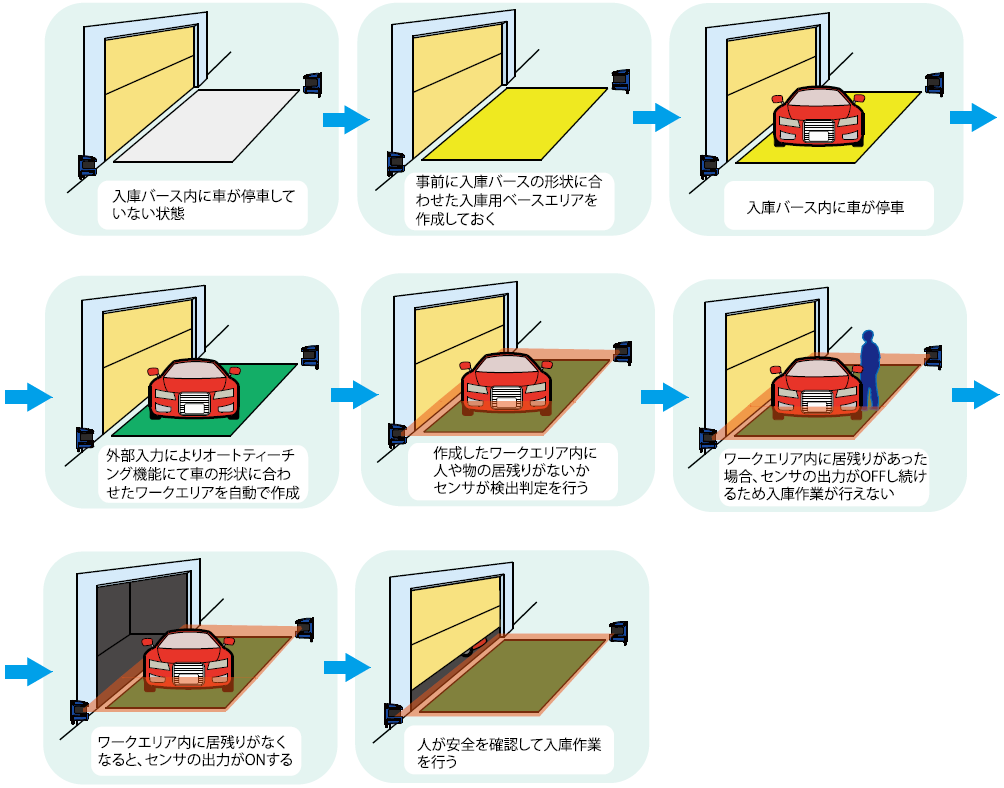
收到时的剩余检测
汽车有库存后,通过自动教学*(获取周边形状并自动创建工作区域的功能)根据汽车形状创建工作区域,并检测设置工作区域中的剩余部分。
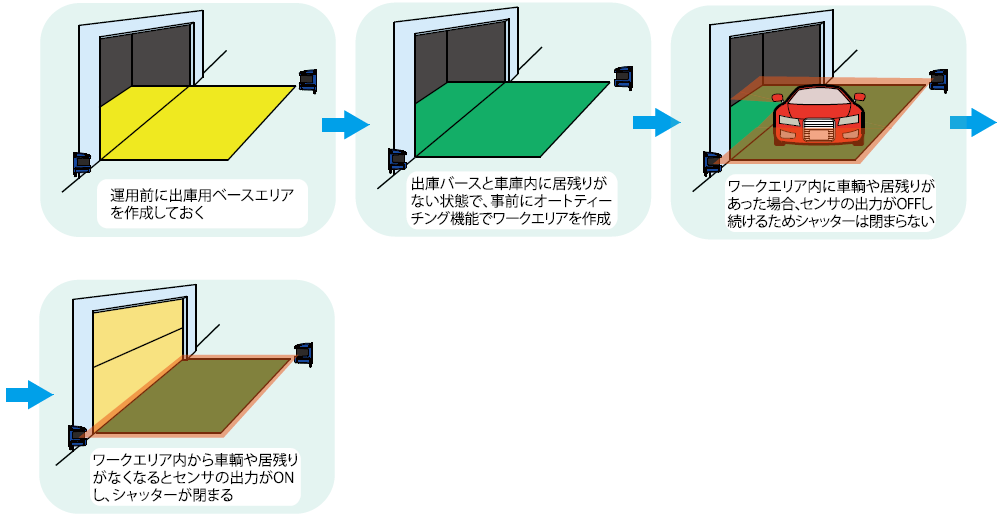
离开时检测离开
离开汽车后,我们会在关门前检测到工作区内的残留物。
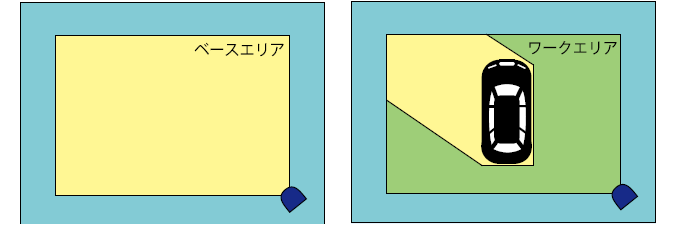
基础区域
通过输入创建区域时的距离和角度范围。预先设定的
工作区域
由输入信号自动创建。在此区域执行检测判断
★在操作前大致设置包括要监视的区域的基本区域。车载存储后,使用外部输入通过自动输入根据车辆存放条件设置工作区域。工作区域不是在基础区域之外创建的,因此不受不必要的背景影响。此外,可以单独设置收货时和发货时的基准区域。
★通过安装两个传感器,您可以消除该区域的盲点。
收据操作
交货工作

范围传感器
光电和激光传感器
钢和起重机传感器
应用系统
光数据传输设备
计数器
自动门

日本北阳范围传感器UXM-30LN-PW02
日本北阳范围传感器UXM-30LN-PW02
如果忘记密码,请单击此处


产品功能信息
- 如何使用该产品
- 产品原理词汇表
- 应用示例/特殊功能页面
- 产品标准和法律